

 Thanks: 0
Thanks: 0
 Likes: 0
Likes: 0
 Needs Pictures: 0
Needs Pictures: 0
 Picture(s) thanks: 0
Picture(s) thanks: 0
Results 46 to 55 of 55
-
17th March 2012, 10:48 PM #46
 GOLD MEMBER
GOLD MEMBER


- Join Date
- Jul 2010
- Location
- Melbourne
- Posts
- 7,775

Hi Simon,
I'm not sure what would happen. I think the bearings would be fine in the short term. It would likely go past 2800rpm, then either get to a point that the motor couldnt speed up (due to some eletrical effect that I wouldnt fully understand even if I knew what it was, say saturation of the laminations or eddy currents) or the rotor would come to pieces.
Yes Hp goes down with rpm. The best you can hope for is the same torque(or maybe a little more). I have no idea what happens to Hp when you go over the motors rated rpm. My guess is you could get more power, but more power would be more heat.
Dont have a vector drive, I believe the do a better job of maintaining rpm. A normal VSD is just guessing.
A 2hp motor doesnt always draw 1500W, it only draws 1500W when you're asking it to do something that takes 2hp, what it draws at "idle" I have no idea.
Hope I've covered your questions(and someone fixes my misstakes)
Stuart
-
17th March 2012 10:48 PM # ADSGoogle Adsense Advertisement
- Join Date
- Always
- Location
- Advertising world
- Posts
- Many
-
17th March 2012, 11:42 PM #47
GOLD MEMBER
- Join Date
- Oct 2007
- Location
- Alexandra Vic
- Age
- 69
- Posts
- 2,810
 Originally Posted by RayG
Originally Posted by RayG

Mal
-
18th March 2012, 01:11 AM #48
GOLD MEMBER
- Join Date
- Jun 2008
- Location
- Victoria, Australia
- Age
- 74
- Posts
- 6,132
Hi Stuart, Originally Posted by Stustoys
When you go over the rated 50Hz, the power stays constant for a while, but eventually slippage will limit the maximum rpm....
EDIT .. It goes without saying that since HP stays the same while rpm is increasing, the torque starts decreasing above 50 Hz.
This is for a V/F drive
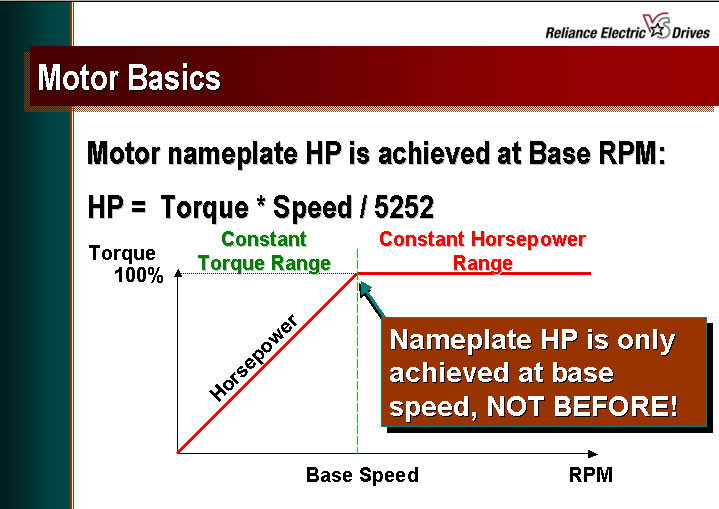
Not sure what happens to the bearings as you get to higher rpm, fan cooling should be better however...
Malb,
Ignore the above graph, it's relevant to V/F drives, not what we were discussing.
I think we are converging on much the same viewpoint, I could take issue with the infinite torque comment, but either way, the end result is the same... if you overload a motor it slows down, eventually stalls and if not protected burns out by overheating... I hope we can agree at least on that.
Regards
Ray
-
18th March 2012, 10:34 AM #49
GOLD MEMBER
- Join Date
- Jul 2006
- Location
- Adelaide
- Posts
- 2,680
Not every one understands or know those simple facts Originally Posted by malb
your wording "Electric motors will draw as much current as they need to to handle an imposed load." gives or may give to those who do not know and could make them assume that a 1hp could draw as much current as it want...with out detrimental effects...hence my words.
no that its all cleared up I hope Simon understands
-
18th March 2012, 11:14 AM #50
GOLD MEMBER

- Join Date
- Aug 2011
- Location
- Melbourne
- Posts
- 2,951
Thanks Eskimo and everyone else, I have been taking in as much of this info as possible. I have been interested about variable frequency drives and motors since I have never played with one yet. Like I said earlier, I have this motor and controller but I wanted to know what it's capabilities are in terms of its power. I guess simplistically I assumed that if I want to replace the factory 1500 W induction motor with a variable frequency drive motor, then it needed to be a similar power otherwise a reduction would be a compromise. I guess to make my point, I think I would be disappointed if I replaced the motor with a 200 Watt 3 ph motor and speed controller and expected to perform similar to the factory 1500W motor. Conversely, putting in a 2400W motor would most likely be unnecessary.... unless it was a freebie that is! Originally Posted by eskimo
Hope I made sense.
Keep talking everyone, I'm listening!
-
18th March 2012, 03:17 PM #51
GOLD MEMBER
- Join Date
- Jun 2008
- Location
- Victoria, Australia
- Age
- 74
- Posts
- 6,132
Hi Simon,
I wouldn't be surprised if that Emerson drive and motor, were a little more sophisicated than we have been thinking. They make pretty good stuff, I've never programmed them, but I've seen Emerson drives used in some pretty slick applications.
I wonder if that controller is a vector drive? It would be the sort of characteristic that would suit a treadmill application....
If it is you will get full torque across the speed range, that's a handy feature to have.
Regards
Ray
-
18th March 2012, 06:44 PM #52
GOLD MEMBER
- Join Date
- Aug 2011
- Location
- Melbourne
- Posts
- 2,951
I think you may well be correct Ray. I reckon I'll have a read hot go at getting it working for me! Like I said, those inputs seem to be digital to me. Just have to come up with the correct sequence to fool the system. Originally Posted by RayG
The first thing I'm going to have to come up with is a simple PIC program to produce a TTL square wave output on my prototype board. That won't take long along with a simple program code.
I'm spewing I didn't take some measurements before I actually dismantled the thing! But I didn't realise what I had when I took it apart. I was quite disappointed when I saw it wasn't a DC motor so assumed it was no good to me. Was only after reading about VFD's on this forum that it clicked about what I had, by that time the treadmill was already out in the backyard for about 12 months! Everything still powers up OK, it's so well made that even out in the weather, the vital components were protected.
Cheers,
Simon
-
18th March 2012, 08:07 PM #53
Blacksmith, Cabinetmaker, Machinist, Messmaker
- Join Date
- Dec 2011
- Location
- Canberra
- Age
- 40
- Posts
- 4,467
Off topic again, but is there any particular reason you use PIC over ATMEGA? I like my Arduino's, they are great fun to play with. Originally Posted by simonl
Don't you have the original control board from the treadmill? I'm guessing not cause that would be the easiest way to test the motor.
Ewan
-
18th March 2012, 08:57 PM #54
GOLD MEMBER
- Join Date
- Jun 2008
- Location
- Victoria, Australia
- Age
- 74
- Posts
- 6,132
Hi Ewan, Originally Posted by Ueee
Real programmers use PIC, Arduino's are toys**...
Actually Microchip has lately been pushing it's Arduino clone system, in view of the popularity of the Arduino..
For what it's worth I use both, but prefer Hi-Tech C on the pics, but programmed pics in assembler for many years..
Regards
Ray
**Just kidding... actually I don't mind Arduino, I wonder if there is an "Emerson Shield"...
-
19th March 2012, 08:14 AM #55
GOLD MEMBER
- Join Date
- Aug 2011
- Location
- Melbourne
- Posts
- 2,951
Hi Ueee, Originally Posted by Ueee
Don't want to bore you too much but I found the treadmills (yes 2) when I drove past a local gym, they were throwing them out and had them out in the carpark where they stayed for a few days. After asking permission I decided to take them home thinking there must be some good parts in them, a DC motor being one part I wanted.
Out of interest, after lugging them home I plugged them in and they both worked fine although they looked very used and the hour meter showed many thousands of hours (meant nothing to me). So, I figured I may as well take one apart and have a look. To my surprise, no DC motor but an AC one. I figured I couldn't really use an AC motor (not for a wind generator anyway which is what I had in mind) So I looked at both and decided to make one good one out of the two that would look OK. I then sold the good one on ebay and made a tidy profit which left the other and home, where it sat in the backyard for a while. It sat there until I realised that I had a 3 ph motor with a VFD, after reading and lurking on this forum. By this time I had already thrown out the top console - Bad mistake! Very bad mistake
So i wasted no time in recovering all the good stuff, including the pump, motor and controller.
Why use PIC? Well actually I use PICAXE stuff because I have never bothered to learn assembly and PICAXE stuff (as you probably know) has a bootleg program inserted that makes the programming an easier process. You no doubt do loose some flexibility with it but for me it's fine. I learnt about these after reading about them in SC magazine and I just kept using them since as that is what I have become used to.
I really should learn PIC programming and buy a PIC programming board.
Cheers,
Simon




Similar Threads
-
Current WIP
By Grumpy John in forum WOODTURNING - GENERALReplies: 32Last Post: 24th May 2009, 12:37 PM -
Current set up for your Mig
By Grahame Collins in forum WELDINGReplies: 23Last Post: 7th July 2006, 11:29 AM
